22 GHz帯 周波数変換器
22 GHz帯 低雑音増幅器
加速度計
姿勢軌道制御装置
姿勢軌道制御処理部
蓄電池

蓄電池制御装置
コマンドデコーダ
太陽センサ
コマンド切り替え器
テレメトリ編集装置
テレメトリデータレコーダ

タイマ制御装置
地磁気計
ガスレートセンサ

電圧、温度計測器
点火玉点火用電源
機体計測装置
ジャイロ
ファイバジャイロ
磁気トルカ制御装置
| |
|
|
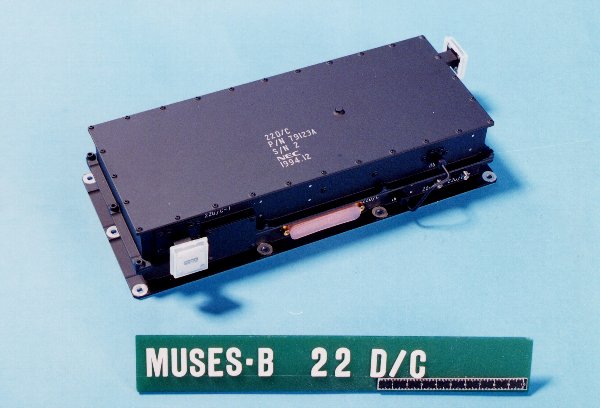
| 22DC 22 GHz帯 周波数変換器 |
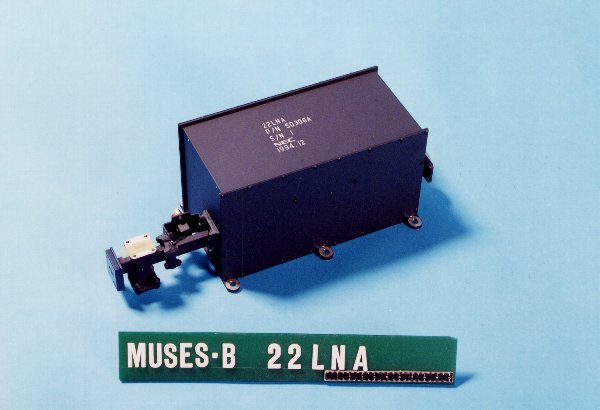
22LNA 22 GHz帯 低雑音増幅器 |
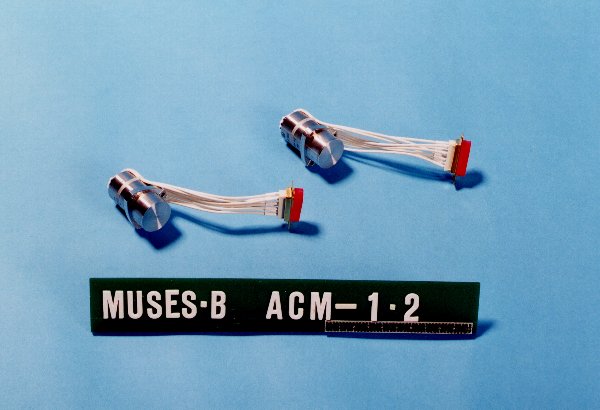
ACM_1_2 加速度計 |
| 22 GHz帯の信号を中間周波数(400MHz-800MHz)に変換する。 |
アンテナで受信した信号をできるだけ増幅器の雑音を付加しないで増幅する。 | 衛星にかかる加速度を計測。打ち上げ時やスラスタによる軌道制御時に使用する。 |
| |
|
|
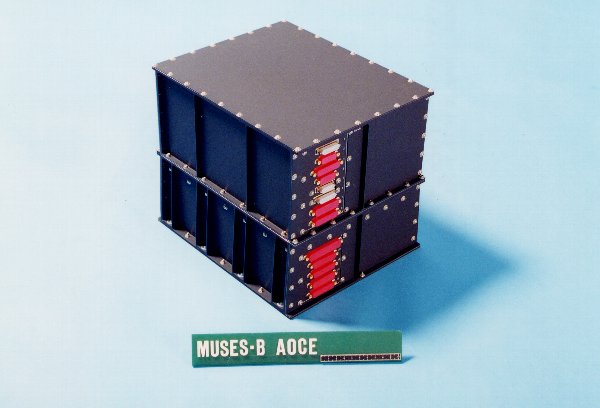
| AOCE 姿勢軌道制御装置 |
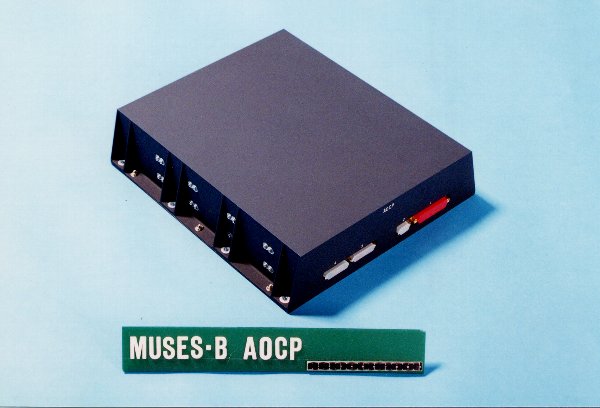
AOCP 姿勢軌道制御処理部 |
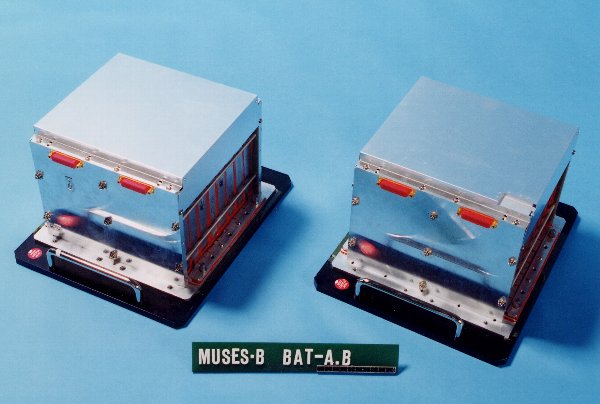
BAT_A_B 蓄電池 |
| 姿勢関係のデータ取得および姿勢制御機器のコントロールを行う。 | AOCEを制御する機上の計算機。 | 日陰等で衛星に電力が供給されないときの衛星の電力源。日照時に充電する。(BAT-A, BAT-Bの2系統持っている。) |
| |
|
|
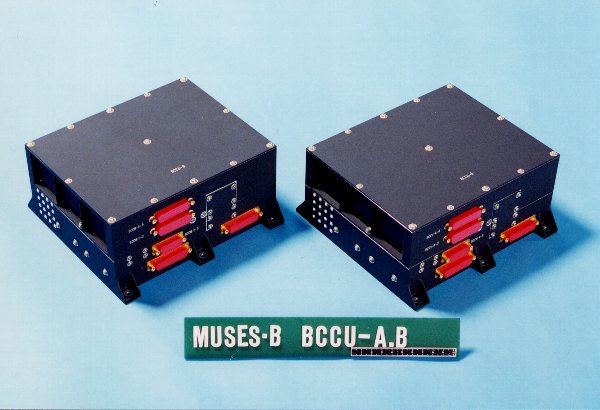
| BCCU_AB 蓄電池制御装置 |
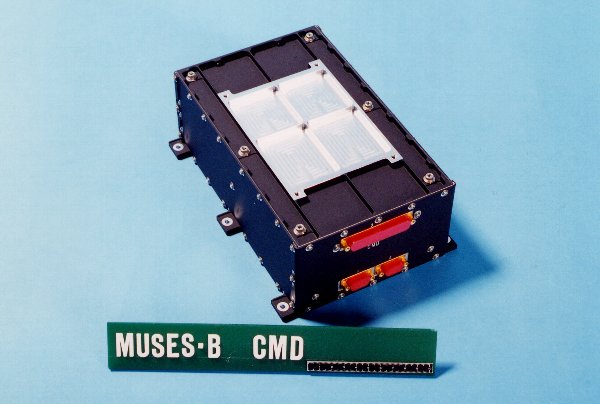
CMD コマンドデコーダ |
CSAS_ABCDE 太陽センサ |
| 蓄電池の充電、放電を管理する装置。(これも蓄電池に対応して、A, Bの2系統ある。) | 衛星に送信されたコマンドを解釈(復調)してコマンドコードを DHUに出力する。 | 太陽の見える方向を検出して姿勢の情報を得ます。(A, B, C, D, E, F)の6個ついている) |
| |
|
|
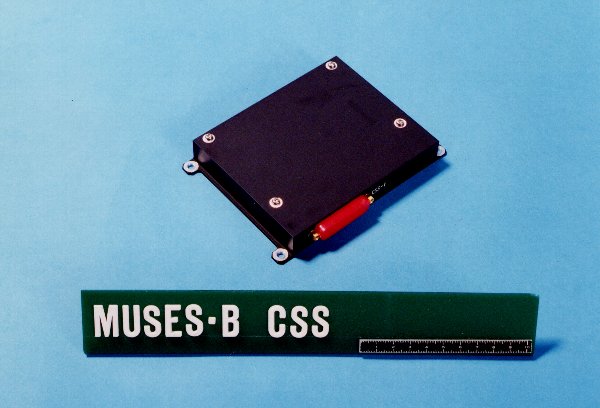
| CSS コマンド切り替え器 |
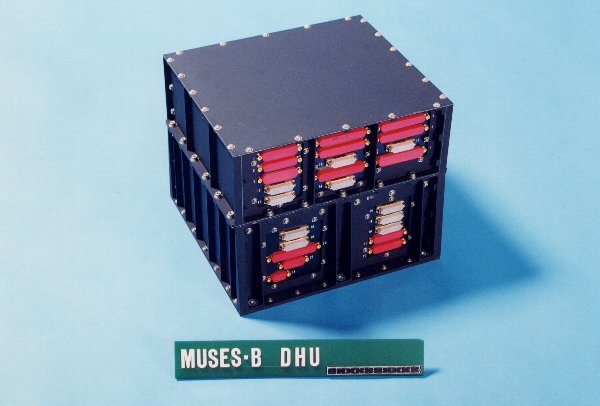
DHU テレメトリ編集装置 |
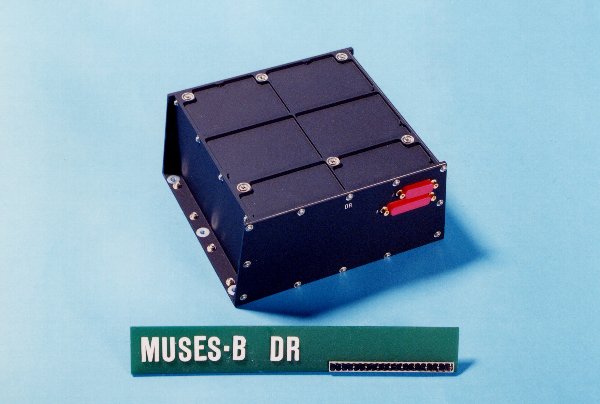
DR テレメトリデータレコーダ |
| 衛星コマンド信号を受信するアンテナを地上からの信号の受信レベルを見て切り替える。 | データハンドリングユニット。DHUでは、各機器からの送られてきたテレメトリの編集、CMDから受け取ったコマンドを各機器へ出力、および、自動実行プログラムの実行を行う。 |
衛星で出力されたテレメトリデータを記録し、運用局(鹿児島)から衛星が見える時に再生して、衛星が運用局から見えないときのテレメトリデータを取得する装置。
|
| |
|
|
| EPT_SA_RL タイマ制御装置 |
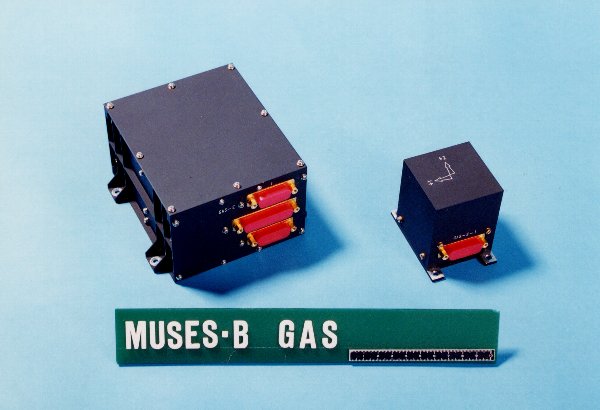
GAS 地磁気計 |
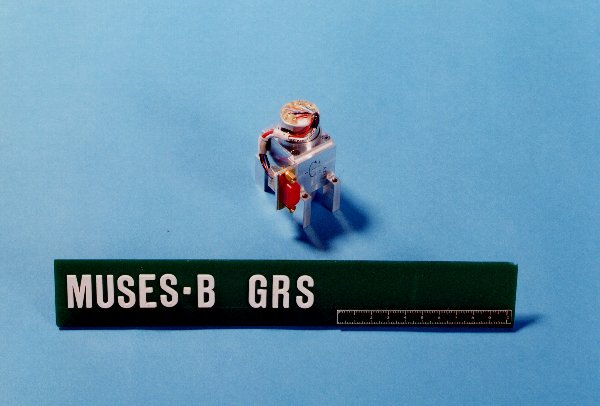
GRS ガスレートセンサ |
| 打ち上げ後の保持展開、切り離しなどのイベントの時間管理を 行う装置。 | 「はるか」のまわりの地磁気の強さを計測する。計測結果は姿勢 制御システムに送られ、磁気トルカの制御のために使用される。 | 打ち上げ時の衛星がスピン状態の時に、Z軸に垂直な方向の角速度を計測し、首振り運動を測定する。 |
| |
|
|
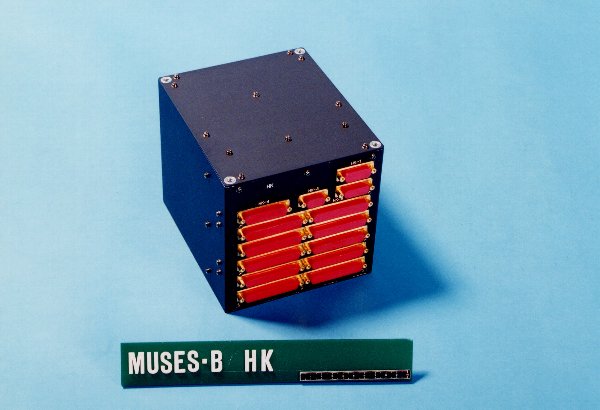
| HK 電圧、温度計測器 |
IG_PS 点火玉点火用電源 |
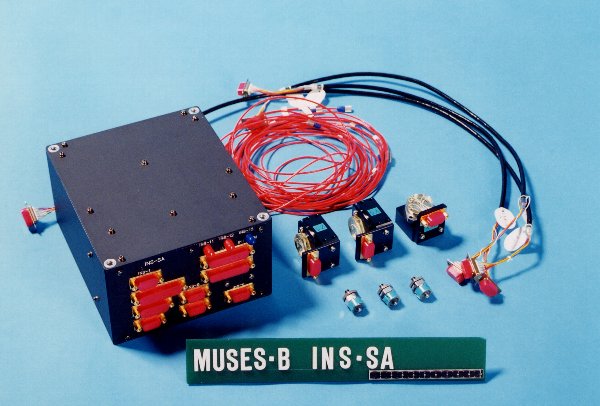
INS_SA 機体計測装置 |
| 各機器の電圧および温度を計測する装置。 | パドルの展開や、Kuアンテナの展開時に、それぞれの機器を止めている部分を分離するために、火薬(点火玉)を使っている。それらの火薬を点火させるための電源。 | 機体計測装置。打ち上げ時に加速度と4段目のロケットの燃料圧力を 計測する。 |
| |
|
|
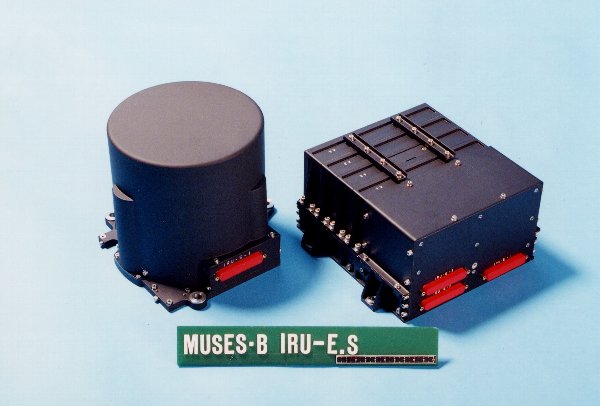
| IRU_ES ジャイロ |
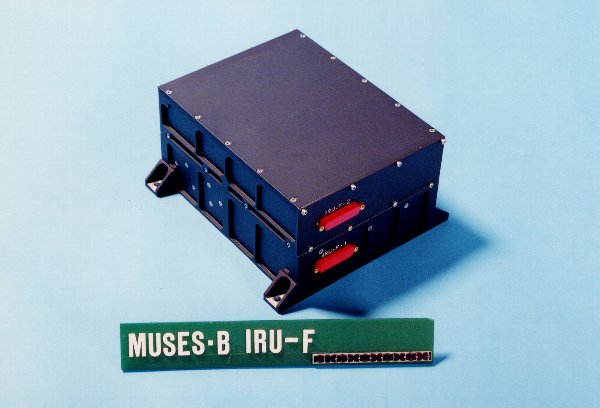
IRU_F ファイバジャイロ |
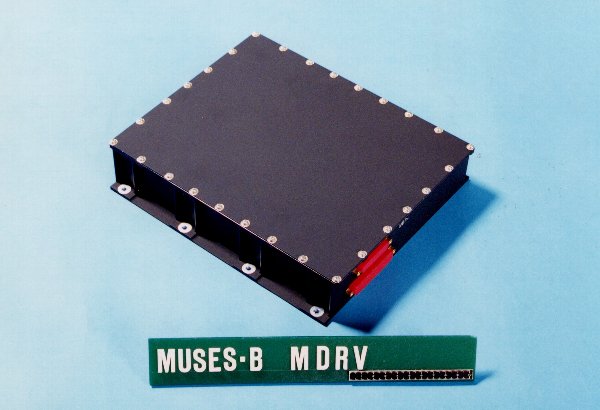
MDRV 磁気トルカ制御装置 |
| 衛星の回転速度を計測する。X, Y, Z, S (スキュー、X,Y,Zの中間)の4つを持つ。実際には、それらのうちの3つを使っている。 | 「はるか」では、実験的に光ファイバを利用した光学式のジャイロも1つ搭載している。 | AOCSの指示により、磁気トルカ(MTQ)に電流を流す。 |